رباتهای خودروئی یکی از جذابترین از انواع رباتهای هوشمند می باشند و عده ای زیادی از علاقه مندان این حوزه حتما تجربه ای در این بخش دارند. در بازار رباتیک خودروئی انواع مختلف شاسی وجود دارد که می توان از آنها استفاده نمود. رباتها با سایز و ابعاد و تعداد چرخهای متفاوت یک، دو… چهار وجود دارند. انتخاب نوع شاسی به عوامل مختلفی از جمله نوع کاربری مرتبط است.
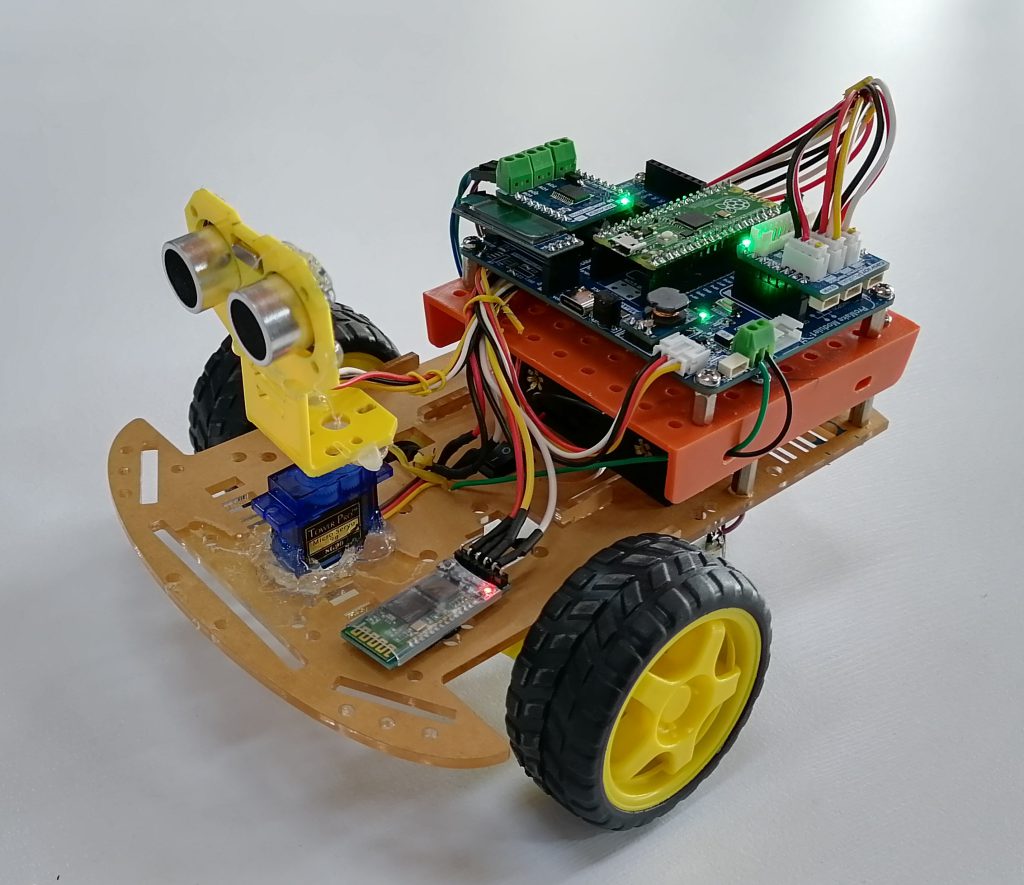
در این نوشته سعی می کنیم با کمک کریر بورد رزبری پیکو پرومیک و ماژولهای کنترل موتور و ارتباطی، زبان ميكروپایتون کیت شاسی دو چرخ را به یک ربات خودروئی با امکان تشخیص مانع و هوشمند با قابلیت کنترل ریموت از طریق اپلیکیشن موبایل تبدیل کنیم.
ابزار و تجهیزات مورد نیاز:
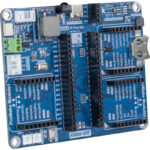
کریر برد پیشرفته رزبری پیکو پرومیک
ماژول کنترل موتور DC پرومیک MDRV M2
ماژول ارتباطی یونیورسال پرومیک
ماژول رزبری پیکو
سرو موتور مدل SG-90
ماژول بلوتوث سریال مدل HC-06 همراه با برد کمکی
ماژول فاصله سنج التراسونیک SR-04
ماژول OLED 32×128
باتری قابل شارژر 18650، 3 عدد و جا باتری سیم دار
بدنه و شاسی پلکسی ۳ میلیمتر ربات ۲ چرخ مهندسیکا
براکت نصب سنسور التراسونیک HC-SR04
شاسی پلاستیکی لبه دار و سوراخ دار ابعاد 10 در 10
کانکتور مادگی 4 تایی، 2mm Pitch (Grove)سیم دار، 4 عدد
چسب حرارتی، چسب دو طرفه و پیچ گشتی
مقداری سیم وایررپ و وارنیش
پیچ سایز M3x6mm ، چهار عدد
اسپسر M3x30mm ، چهار عدد
اسپسر M3x10mm ، چهار عدد
مهره سایز M3، هشت عدد
برای آشنایی بیشتر با محصولات به کار رفته در این کیت برروی آنها کلیک کنید
برای شروع کار تجهیزات را طبق لیست اشاره شده آماده کنید و مطابق بخش های زیر بترتیب و منظم نصب و مونتاژ ربات را انجام می دهیم.
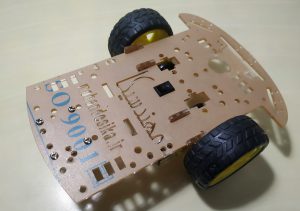
سرهم بندی شاسی ربات:
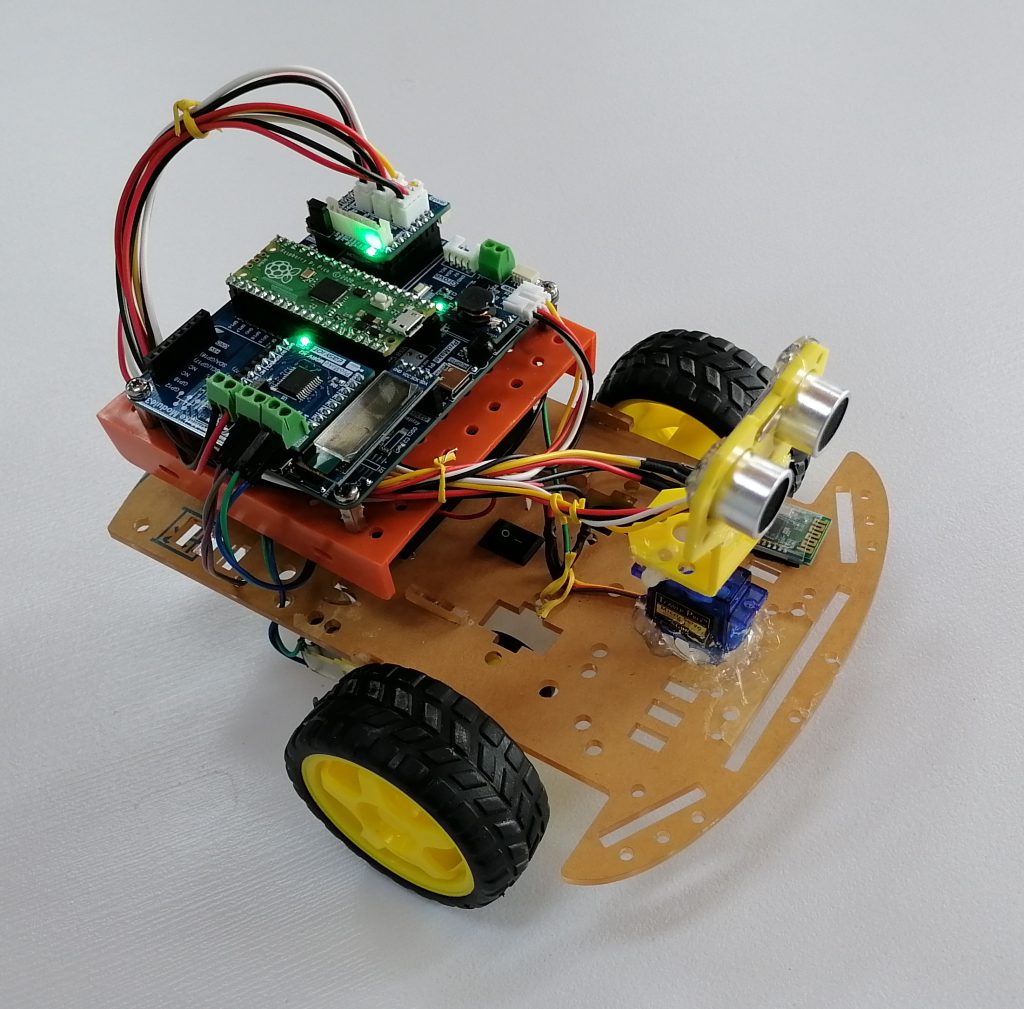
طبق راهنمای نصب موجود در بسته مهندسیکا، شاسی ربات دو چرخ را سر هم بندی و آماده می کنیم .نصب موتورهای TT و براکت نگهدارنده گیربکس بسیار ساده است و براحتی با توجه به عکسها می توانید شاسی را سرهم کنید. نکته مهم در این مرحله این است که با توجه به نیاز پروژه جاباتری سایز معمولی AA را استفاده نمی کنیم و بهجای آن از جاباتری 3 تایی سایز 18650 استفاده می کنیم. شاسی مونتاژ شده باید مطابق شکل زیر باشد.
سوراخ کاری شاسی و شاسی سوراخ دار 10 در 10:
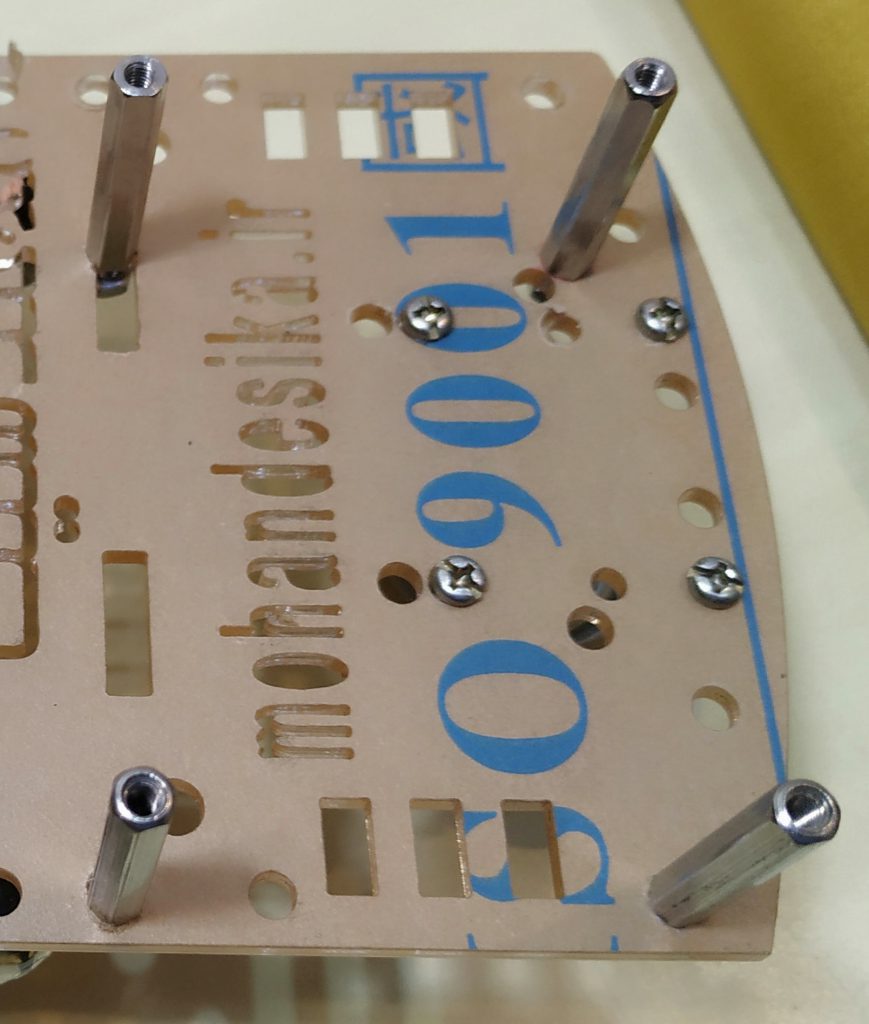
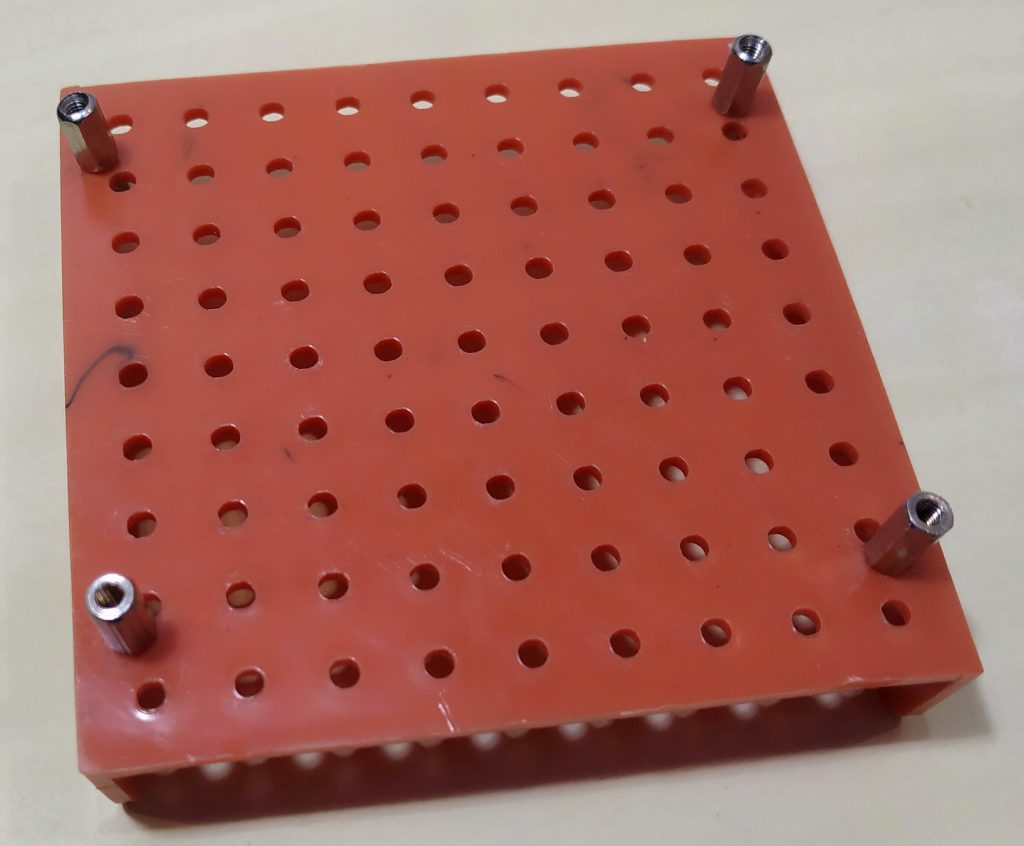
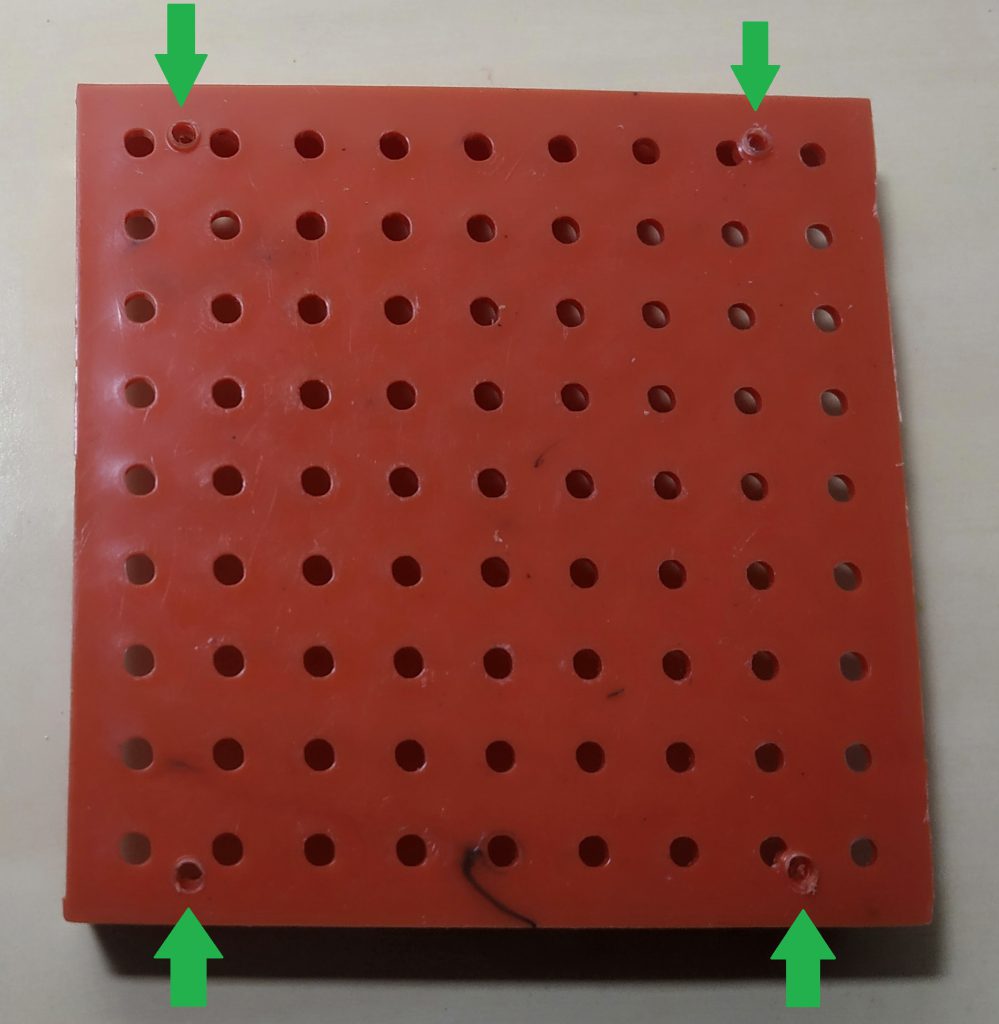
برای نصب کریر بورد رزبری پیکو پرومیک روی شاسی و البته جاباتری 18650 لازم است که اولا از یک قطعه اضافی سوراخ دار استفاده کنیم و برای سرهم بندی کریر بورد سوراخ کاری روی شاسی مطابق شکل زیر انجام شود. برای مشخص نمودن محل سوراخ کاری روی شاسی ربات مطابق عکس زیر جاباتری را قرار دهید و سپس شاسی سوراخ دار را روی شاسی ربات تنظیم نمائید. عملا با سوراخ های روی شاسی 3 عدد از موارد موجود قابل استفاده هستند و فقط یک سوراخ نیاز می باشد. جاباتری با چسب دوطرفه به شاسی متصل می شود. البته می توانید آنرا با سوراخ کاری و پیچ هم متصل نمائید اما با توجه به قرار گیری مابین 4 اسپیسر با چسب دوطرفه به راحتی نصب می شود.
برای شاسی پلاستیکی ابتدا کریر بورد رزبری پیکو را روی آن قرار دهید و در نظر گرفتن محل پیچ اسپیسر اتصال به بدنه ربات سوراخ های جدید را مشخص نمائید.
توجه :برای استفاده از ابزاری مثل دریل لازم است که مهارت بهکارگیری از این ابزار را داشته باشید و در صورت نیاز از افراد با تجربه و متخصص کمک بگیرید.
نصب جاباتری:
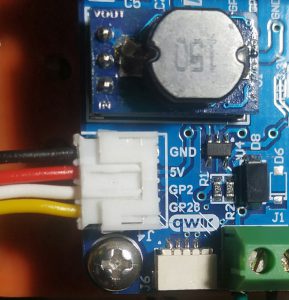
جاباتری 3 تایی 18650 را که در مرحله قبل محل نصبش مشخص شد با یک چسب دو طرفه بهسادگی رو شاسی نصب نمائید و سیم قرمز خروجی (مثبت) را برای اتصال به کلید از طریق سوراخ به زیر ربات ببرید و مطابق شکل زیر به کلید با لحیم کاری متصل نمائید. یک سیم دیگر (اینجا سیم سبز) بعد از کنتاک کلید به بالا و ورودی مثبت Vin روی کریر بورد وصل می شود. سیم منفی، مشکی رنگ را به کانکتور سبز رنگ Vin روی کریر بورد مستقیم متصل نمائید. در مورد باتری ها و میزان آمپر ساعت، پیشنهاد می شود هر سه یک مقدار باشند برای مثال هر سه 2000mAh
توجه :برای استفاده از هویه و لحیم کاری لازم است که مهارت بهکارگیری از این ابزار را داشته باشید و در صورت نیاز از افراد با تجربه و متخصص کمک بگیرید.
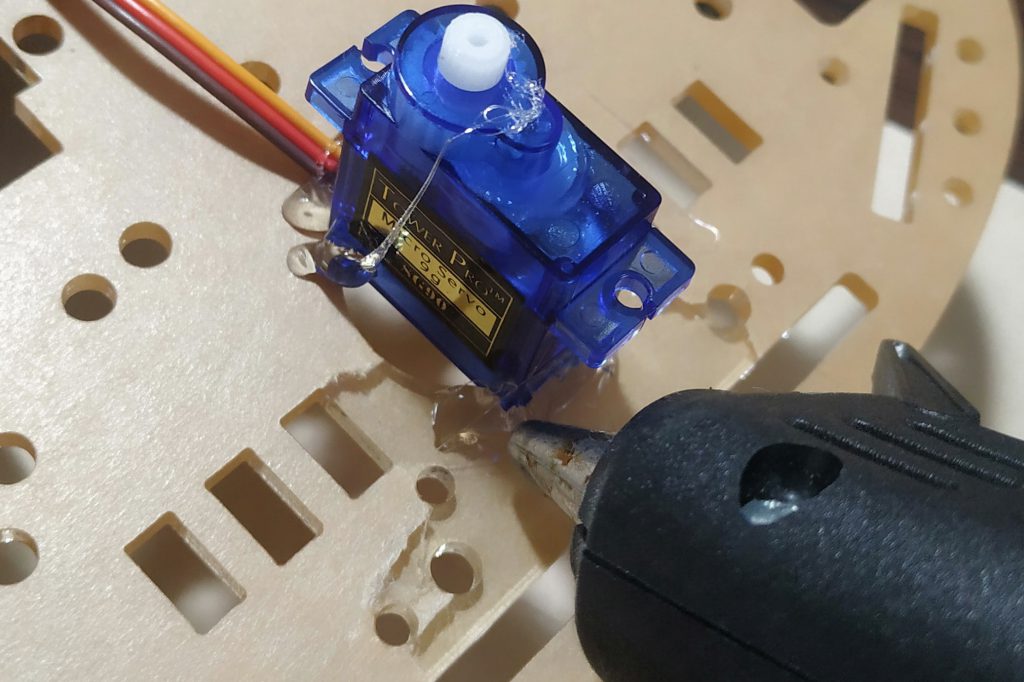
نصب سروو موتور SG-90 و براکت روی شاسی:
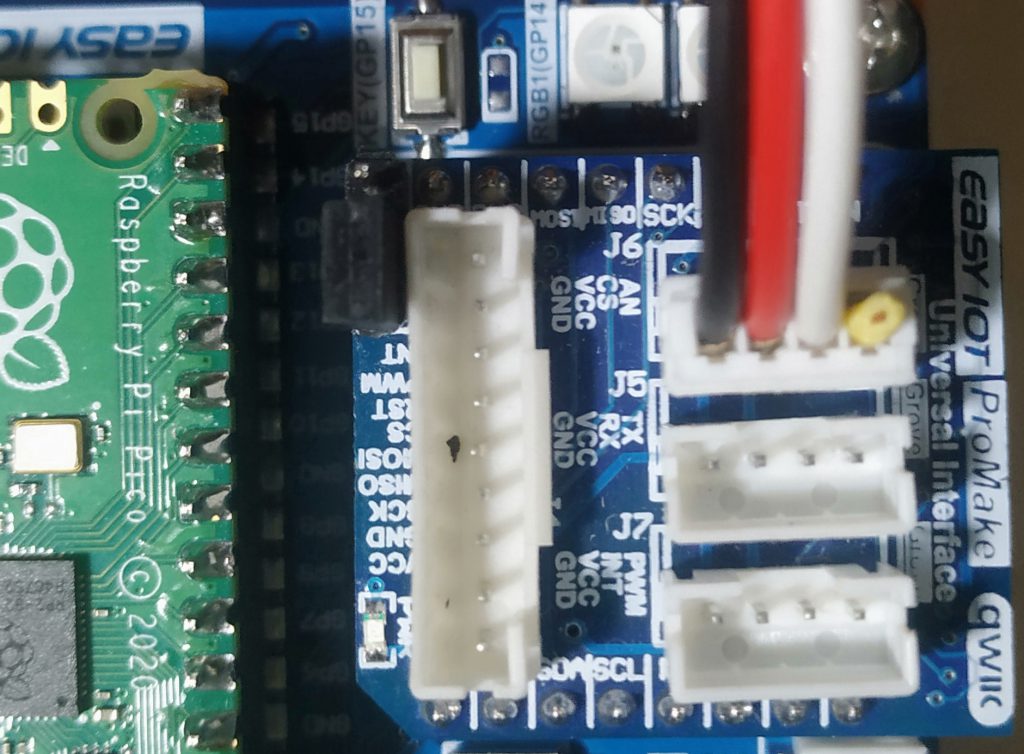
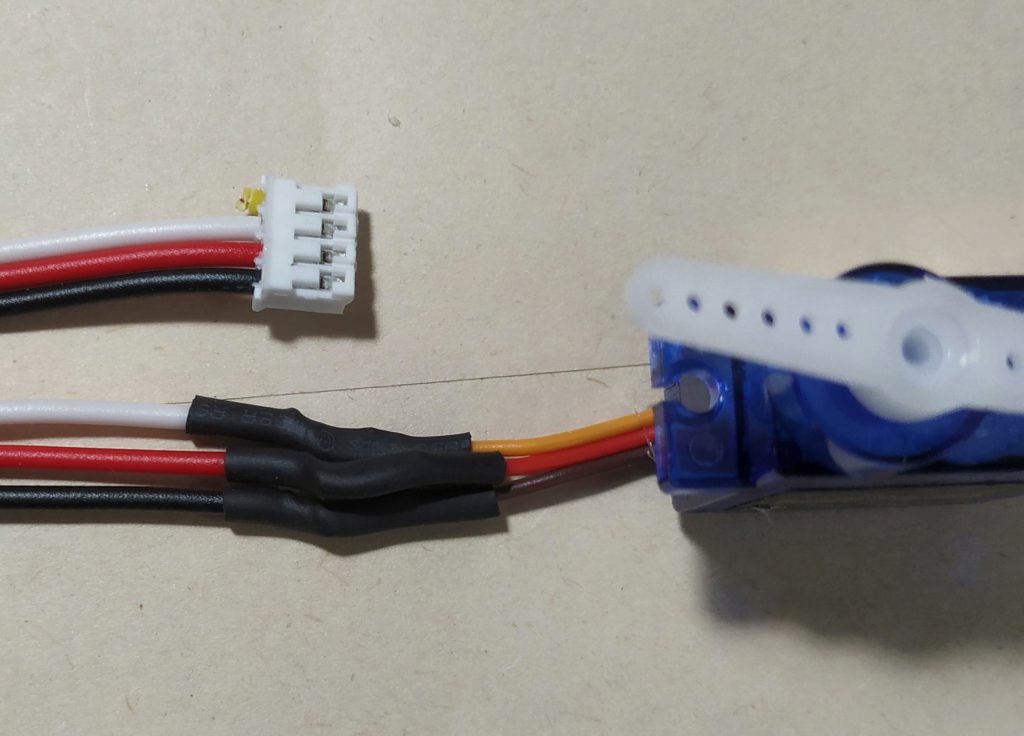
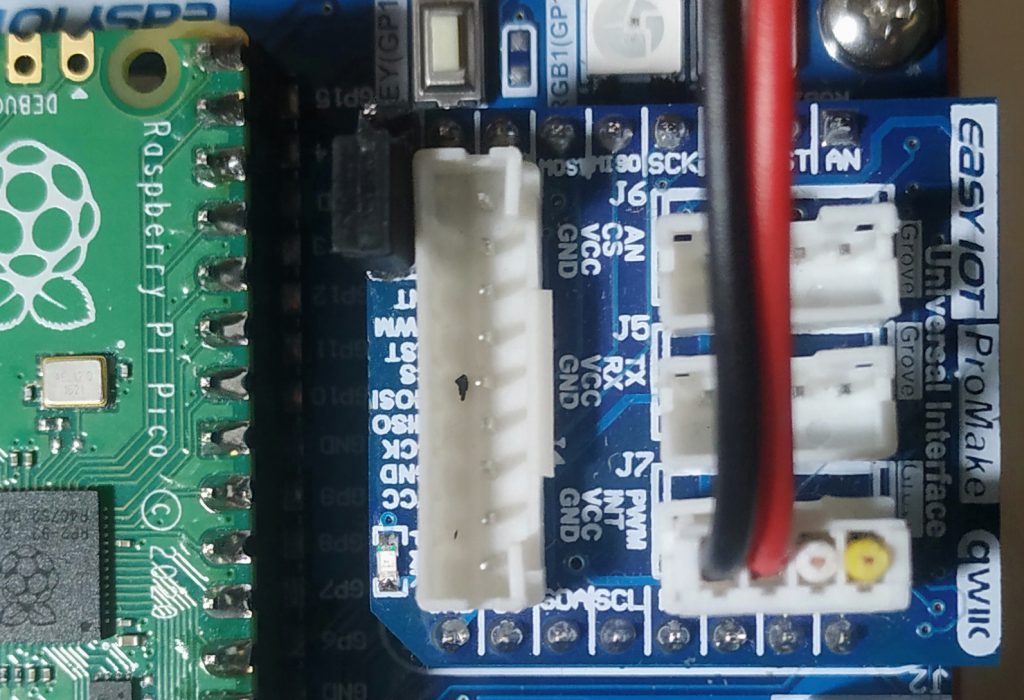
سروو موتور را با استفاده از چسب حرارتی روی شاسی بچسبانید. یکی از تیغه های پروانه همراه سروو را با چسب حرارتی مشابه عکس زیر به براکت(زرد رنگ سنسور اولتراسونیک) متصل نمائید و کابل سروو موتور را به J6 روي ماژول يونيورسال مشابه عکس زیر متصل نمائید.
ردیف
رنگ سیم ماژول
رنگ سیم کانکتور Grove
1
Vcc: قرمز
قرمز
2
GND: قهوه ای
سیاه
3
Command: زرد
سفید
4
NC
قطع: زرد
نصب سنسور اولتراسونیک:
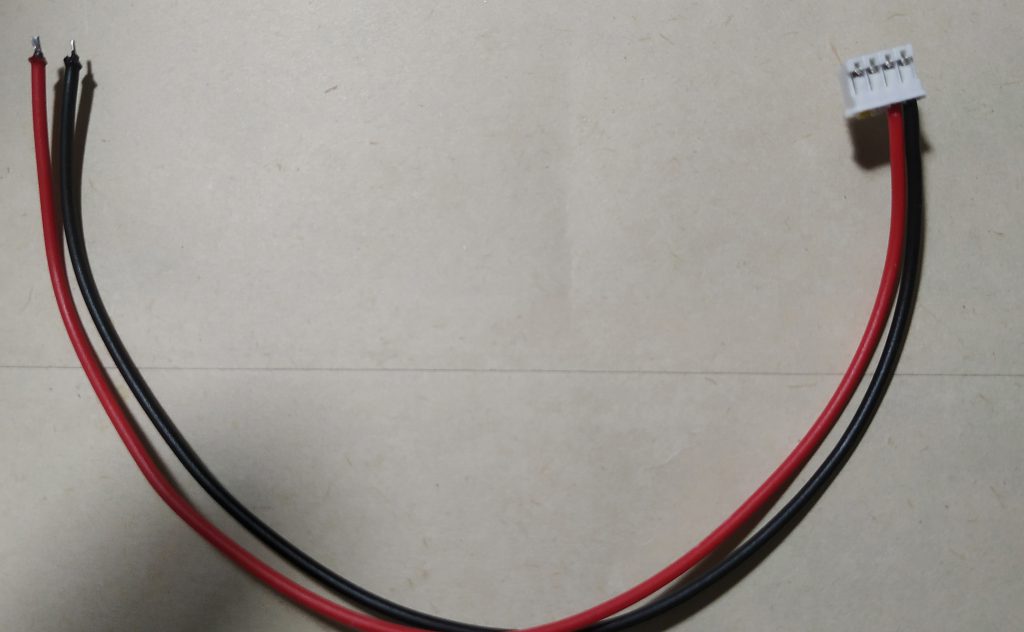
ابتدا می بایست کابل سیم دار کانکتور 4 تایی Grove را مشابه شکل زیر و پینهای جدول، لحیم کاری نمائید و حتما از وارنیش روی کابل استفاده نمائید. بعد از آمادهسازی کابل مطابق عکس زیر، سنسور اولتراسونیک را با چسب حرارتی به براکت متصل نمائید. عملا این سنسور معیار تشخیص مانع و چشم ربات می باشد.نهایتا مشابه عکس زیر اتصالات را برقرار نمائید و کابل سنسور اولتراسونیک را به کانکتور j4 روی کریر بورد متصل نمائید.
ردیف
نام پین
رنگ
1
Vcc
قرمز
2
Trig
زرد
3
Echo
سفید
4
GND
سیاه
نصب ماژول بلوتوث:
مطابق عکس زیر و با استفاده از لحیم کاری و وارنیش حرارتی کابل 4 سیم Grove را به ماژول متصل می کنیم. در واقع پینهای VCC,GND,TX,RX را به کابل مطابق رنگ ربندی ارائه شده منصل و به نهایتا به کانکتور J5 روی ماژول یونیورسال متصل می کنیم.
ردیف
نام پین ماژول
رنگ سیم کانکتور Grove
1
GND
سیاه
2
VCC
قرمز
3
RX
سفید
4
TX
زرد
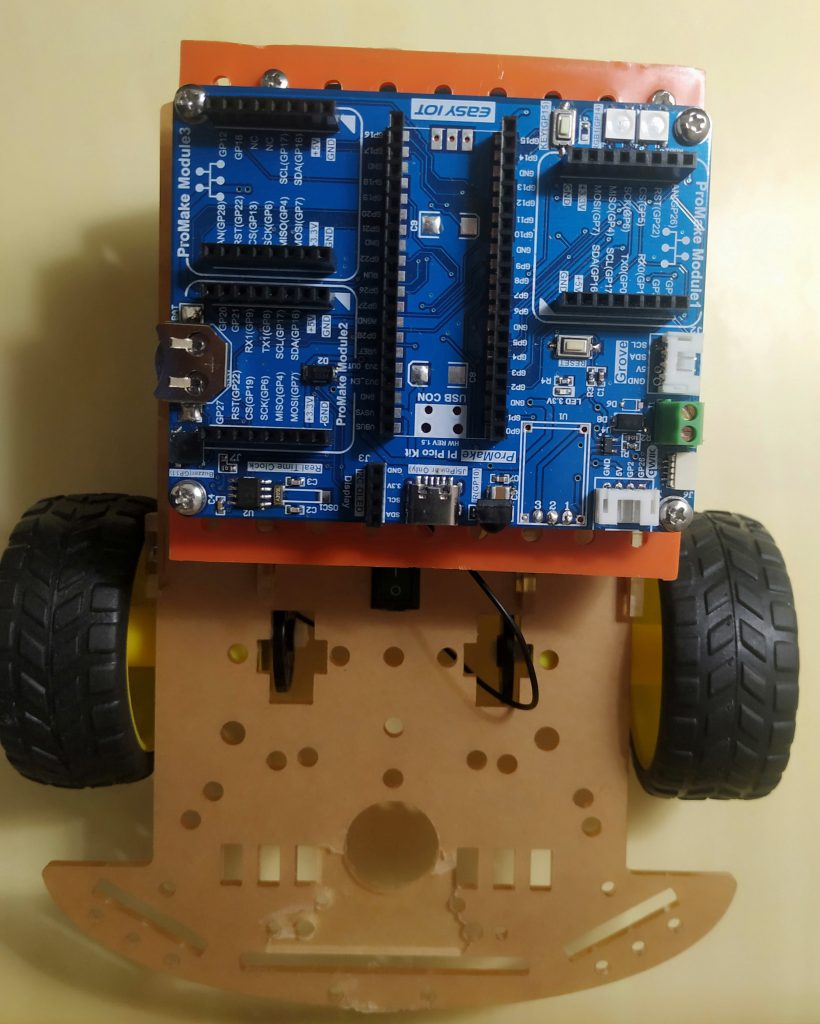
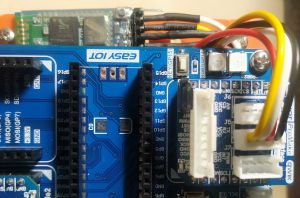
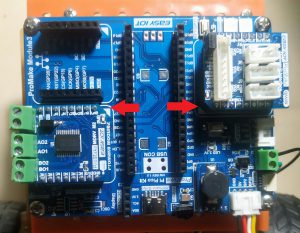
نصب ماژولهای پرومیک درایور موتور DC و ارتباط یونیورسال:
مطابق عکس زیر ماژول درایو موتور DC به اسلات شماره 2 و ماژول ارتباط یونیورسال به اسلات شماره یک متصل نمائید. به جهت کج راهنمای نصب ماژول پرومیک روی کریر بورد دقت نمائید.
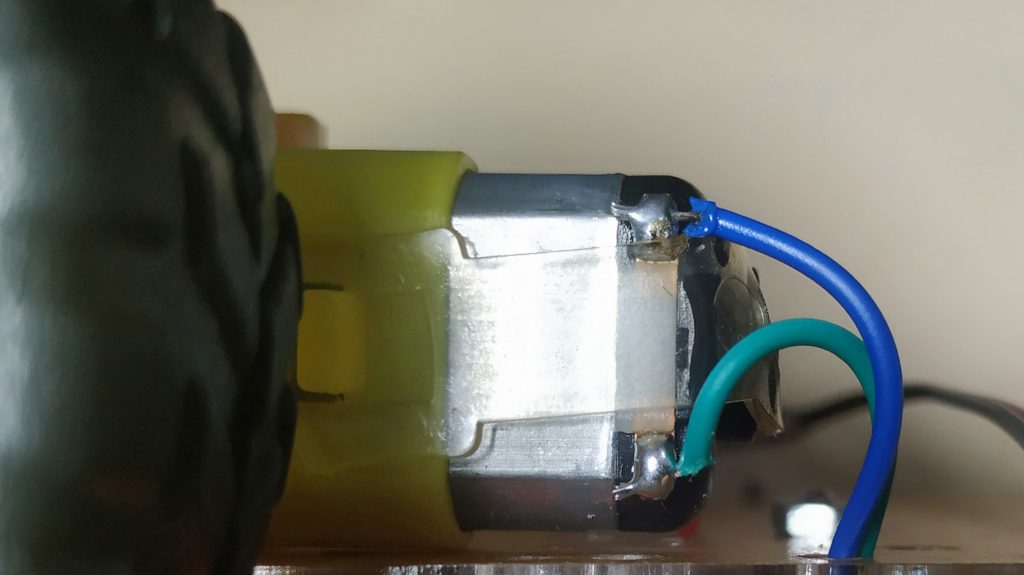
سیم بندی موتورها:
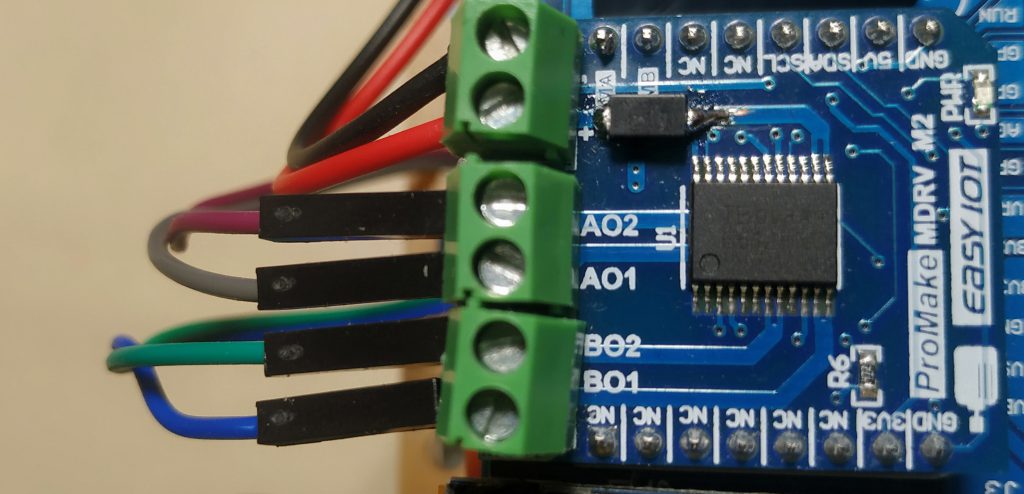
هر موتور دارای دو تیغه مسی می باشد که لازم است به درایور متصل شود، البته برای اینکه چپگرد و راستگرد موتورها مشابه باشد تیغه های بالا را به ورودی A و پائینی را به B متصل می کنیم. برای ورودی پاور به ماژول DC موتور مطابق عکس زیر یک کابل Grove را با سيمهای قرمز و سیاه به پورت j7 ماژول یونیورسال متصل می کنیم. ترتیب را طبق عکسهای زیر رعایت نمائید.
پایان بخش اول
تا این مرحله سخت افزارهای هوشمند سازی پرومیک روی شاسی نصب و تکمیل فیزیکی شد و برای مراحل برنامه ریزی آماده است که در بلااگ بعدی ارائه می شود.